Collaboration Visit to the Institute of Science Tokyo in Japan
July - August 2025
Introduction
In July 2025, Prof. Mauro Dalla Mura, Mohamad Jouni, and Daniele Picone conducted a six-week scientific collaboration visit at the Institute of Science Tokyo, Japan, within the Hatanaka Lab (Department of Systems and Control Engineering, School of Engineering).
The visit was carried out in collaboration with Prof. Kuniaki Uto and focused on the development of a multi-modal and multispectral acquisition utility, aimed at precision agriculture applications.
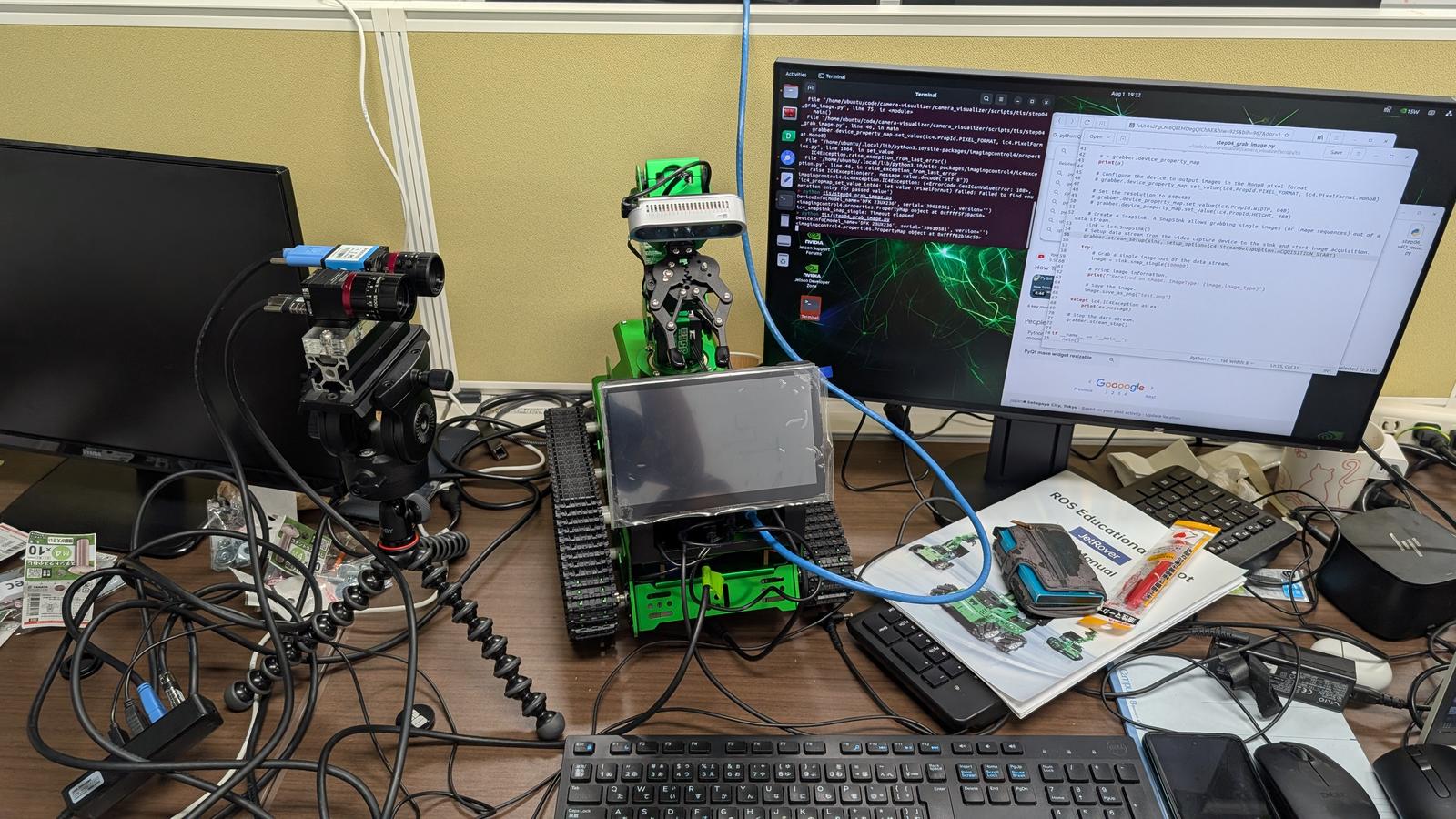
Development of a Multi-Camera Acquisition System
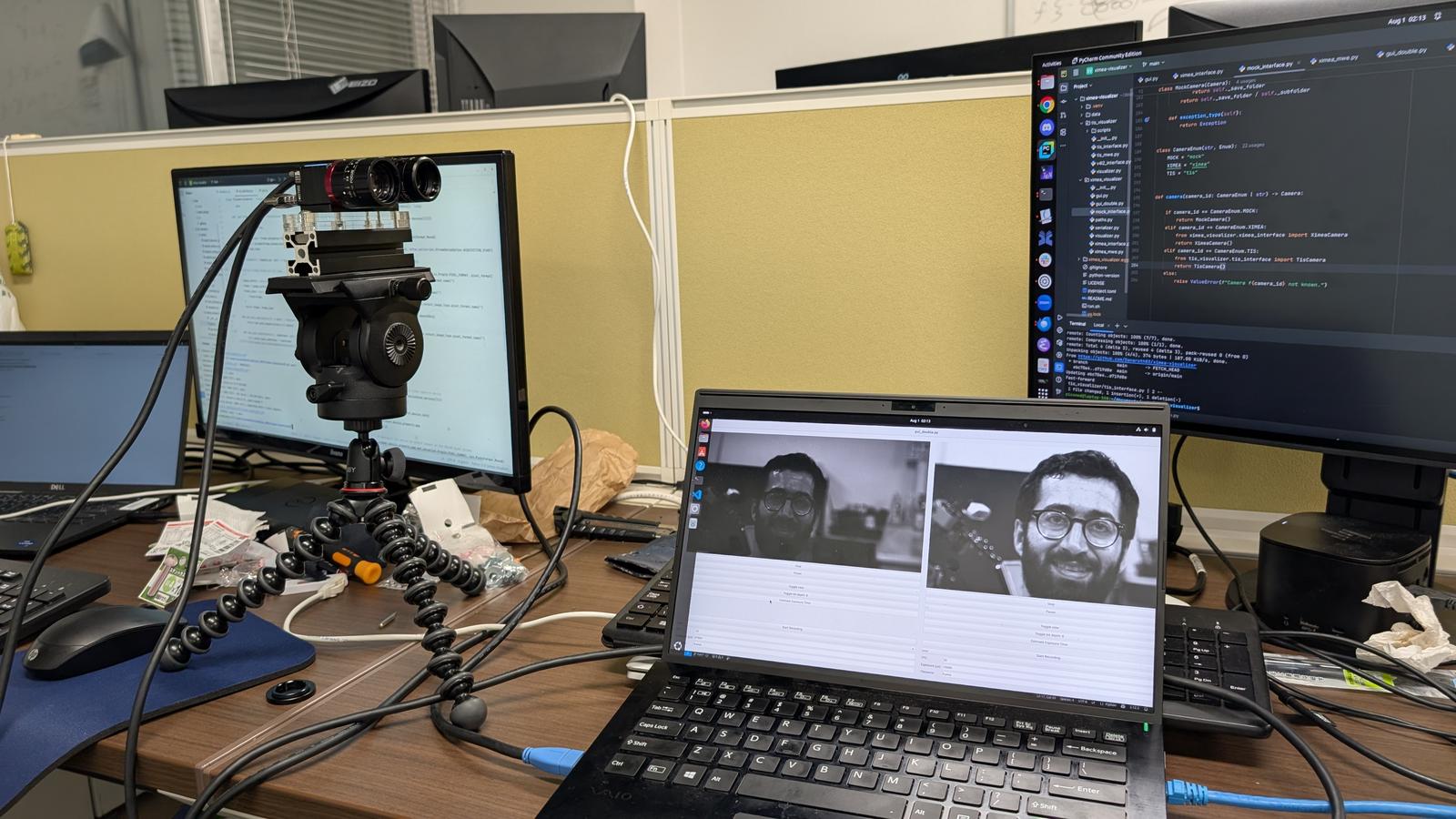
A central outcome of the visit was the design and implementation of a Python-based graphical acquisition interface enabling the simultaneous visualization and recording of hyperspectral and RGB images. The corresponding sensors are:
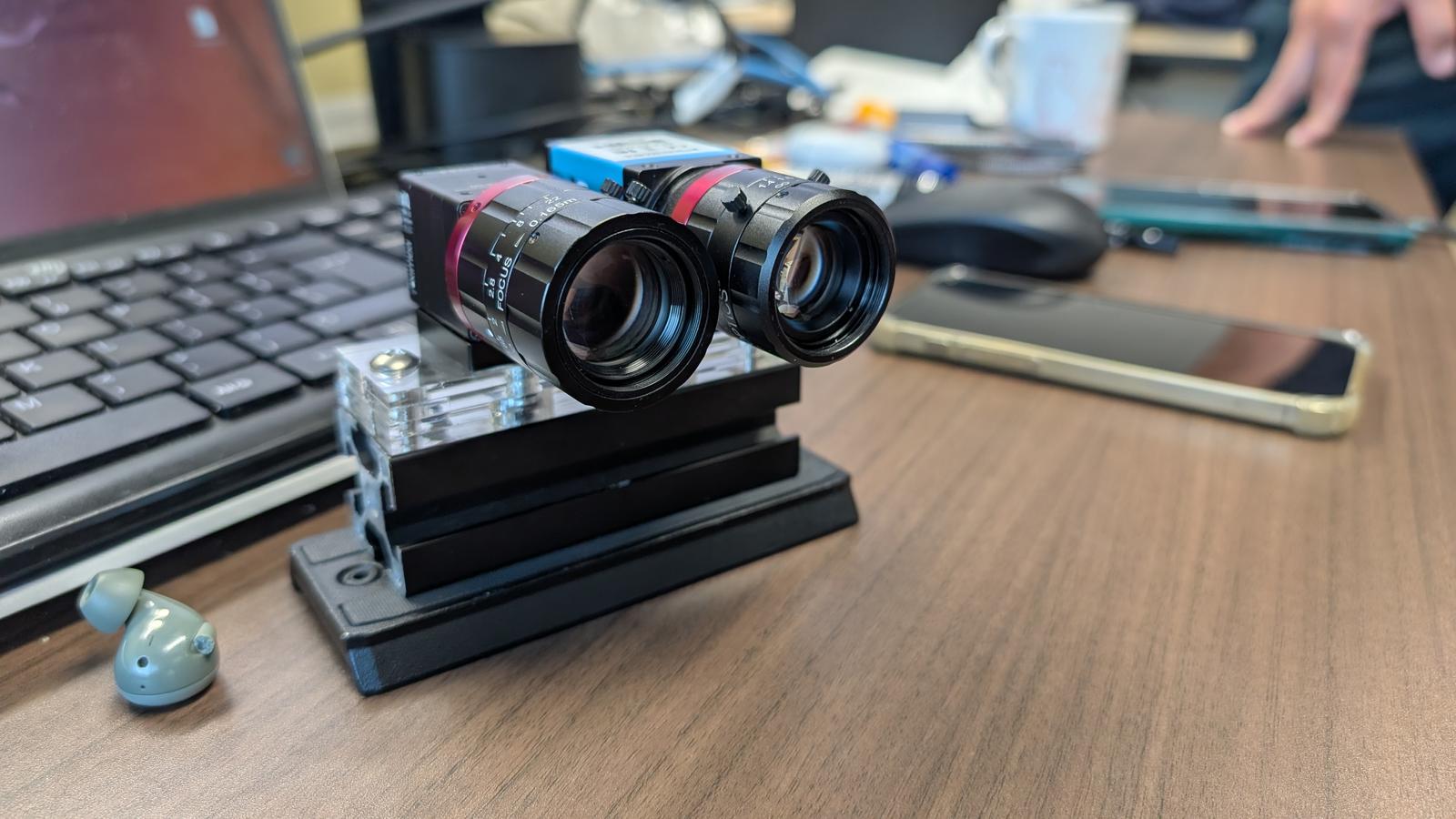
- Hyperspectral sensor: XIMEA MQ02HG-IM-SM4x4-REDNIR (4x4 color filter array in the RED/NIR range, corresponding to 16 spectral bands)
- RGB sensor: The Imaging Source DFK 23UX236 (3-band Bayer color sensor)
The graphical interface was implemented using PyQt5 and designed with a device-independent camera abstraction layer to ensure modularity and extensibility toward additional industrial camera systems.
The software supports:
- Live stream visualization
- Exposure time control with feedback
- Frames-per-second adjustment
- Mosaiced and demosaiced image visualization
- Simultaneous dual-camera acquisition
- Frame sequence recording in ENVI and NumPy formats
The acquisition utility is available as an open-source repository:
https://github.com/mira-imaging/camera-gui

Mechanical Integration and Camera Mounting
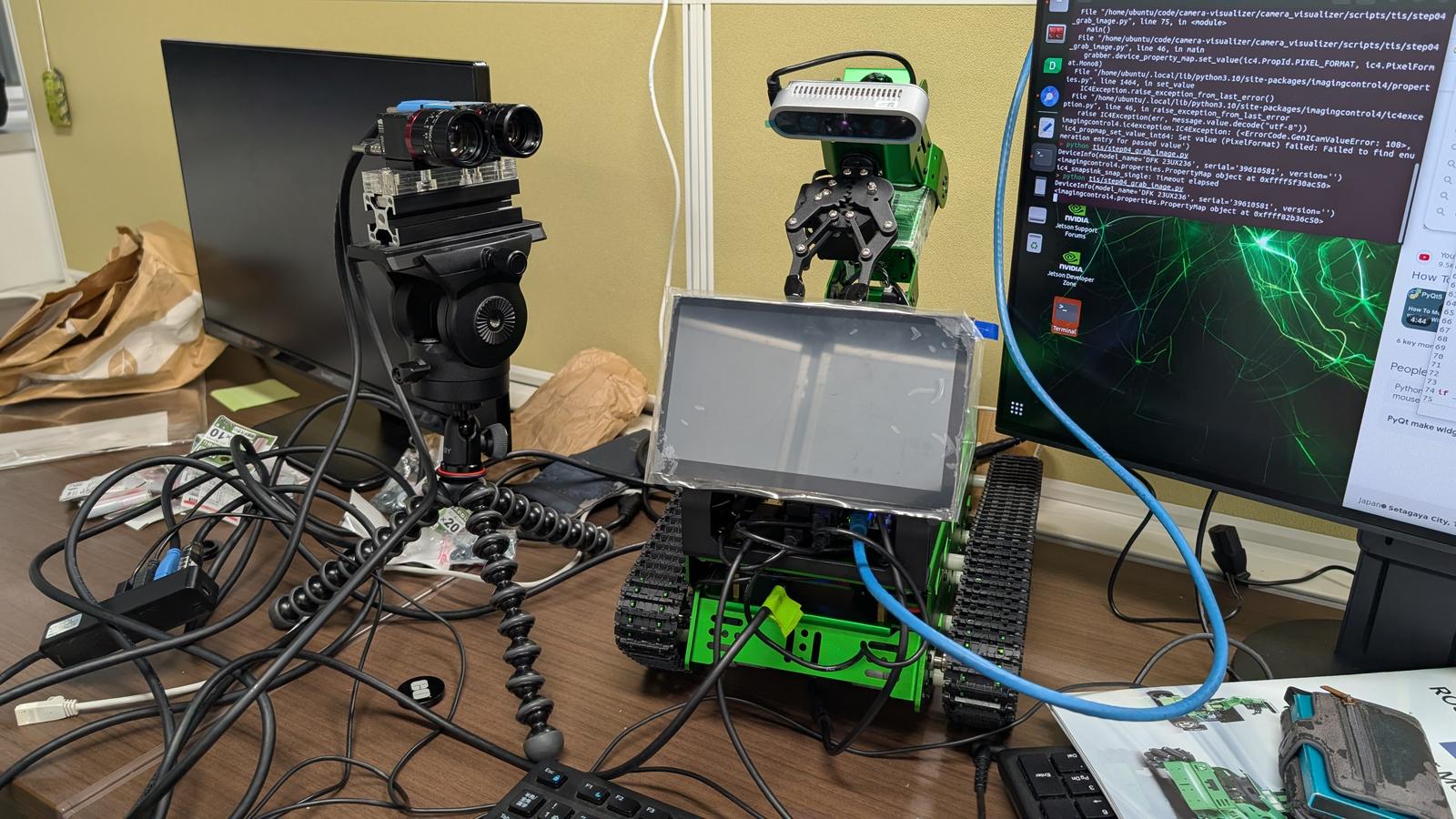
To ensure stable spatial alignment between the hyperspectral and RGB modalities, both sensors were mounted on a custom-designed horizontal plate compatible with standard tripod systems.
The mounting solution guarantees:
- Fixed relative positioning between sensors
- Preserved baseline geometry
- Reproducible mechanical configuration
- Compatibility with robotic platforms
The design files (PDF drafts, STL models, Blender renders, and laser-cut specifications) are included in the repository to ensure reproducibility and facilitate deployment by collaborating teams.
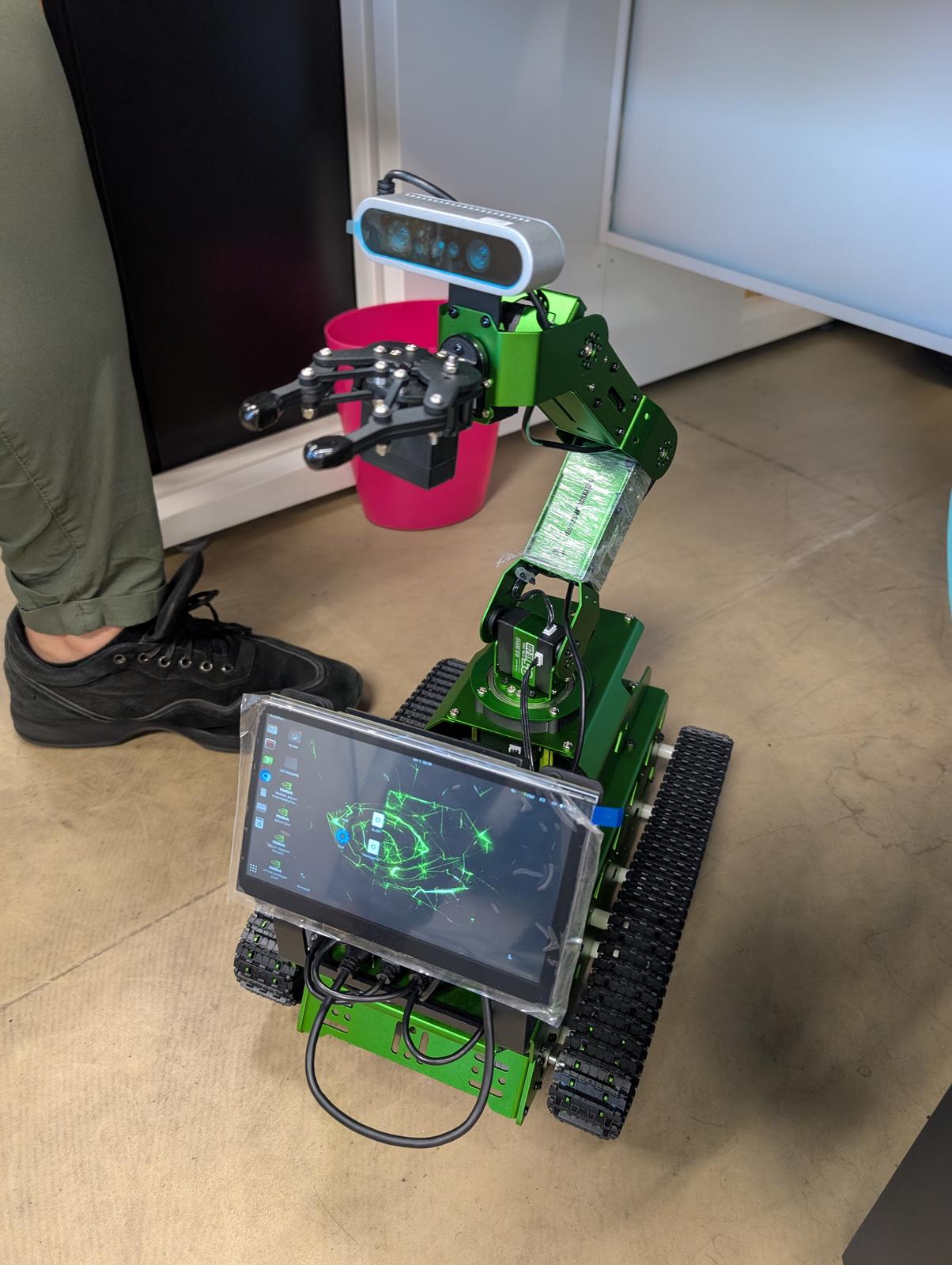
Deployment on the JetRover Robotic Platform
The developed acquisition interface was successfully installed on the Jetson embedded computing board of a JetRover robotic system.
This integration enables field-ready multi-modal data acquisition for:
- Precision agriculture monitoring
- Vegetation spectral analysis
- RED/NIR-based crop health assessment
- Autonomous robotic data collection
The system is scheduled for experimental deployment on agricultural fields at the Suzukakedai campus under the supervision of Prof. Uto. Future developments include the integration of the acquisition utility within a ROS 2-based robotic architecture. This integration enables remote operation, distributed processing, and seamless interoperability with navigation, localization, and data management modules.
Scientific and Strategic Impact for the MIRA Platform
This collaboration contributes to the MIRA platform in three major dimensions:
- Software Infrastructure: Development of a reusable, modular acquisition framework compatible with robotic systems.
- Hardware Integration: Robot-based mounting of a physical multi-modal spectral imaging system.
- Application Deployment: Field-oriented multi-sensor acquisition pipeline for agricultural monitoring.
- International Partnership: Consolidation of long-term scientific collaborations between Université Grenoble Alpes / Grenoble INP / GIPSA-lab (France) and the Institute of Science Tokyo (Japan) in robotic spectral-spatial image sensing and precision agriculture.
Acknowledgements
This work is supported by the Auvergne-Rhône-Alpes (AuRA) region under the project "Pack Ambition International 2021", through Grant 21-007356-01FONC and Grant 21-007356-02INV.
The visit forms part of an ongoing scientific collaboration between Université Grenoble Alpes / Grenoble INP / GIPSA-lab (France) and the Institute of Science Tokyo (Japan). The research activities were carried out at the Hatanaka Lab, Department of Systems and Control Engineering, School of Engineering, Institute of Science Tokyo.
The mobility support provided by the AuRA Region has enabled the consolidation of international research links and the initiation of structured discussions with the National Agriculture and Food Research Organization (NARO), Japan. These exchanges aim to establish joint research activities in real-time agricultural monitoring using multimodal, multispectral, and hyperspectral imaging systems deployed on robotic platforms.
Supported By
Event Gallery